2024年12月29日
星期日

近日,,華為公開了一項(xiàng)關(guān)于自動駕駛技術(shù)的新專利,,其通過融合攝像頭和雷達(dá)兩類傳感器,從而更加全面的感知車輛周圍的障礙物,,提升自動駕駛技術(shù)的安全性,。

自動駕駛系統(tǒng)一般由攝像頭,、雷達(dá)和處理器共同組成,,通過軟件和硬件的結(jié)合,,實(shí)現(xiàn)自動駕駛功能。然而攝像頭存在一定的視野盲區(qū),,雷達(dá)的探測范圍也有一定限制,,很難精確的探測到周圍所有的障礙物。而華為申請的這項(xiàng)專利則是融合了攝像頭和雷達(dá)這兩類傳感器,,將它們所感知到的障礙物分布信息進(jìn)行融合,,融合后車輛能夠通過的區(qū)域?qū)⒁愿怕实男问綇南到y(tǒng)中展示,。
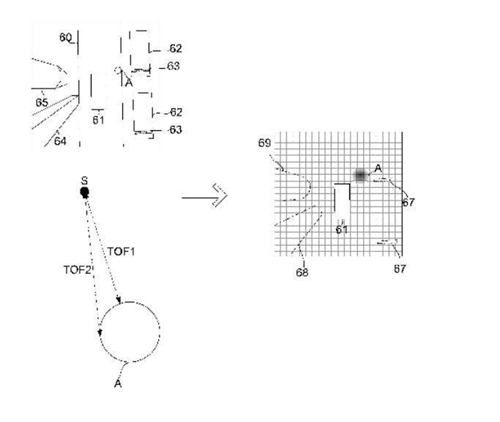
其專利的原理大致分為兩步,,第一步為系統(tǒng)通過攝像頭獲取的圖像數(shù)據(jù),分析得出障礙物的第一概率分布圖,,第二步為系統(tǒng)根據(jù)雷達(dá)回波信號的回波時(shí)間以及回波寬度,,從而分析出障礙物的第二概率分布圖,系統(tǒng)根據(jù)障礙物的第一概率分布圖以及障礙物的第二概率分布圖共同分析,,最終獲得更加準(zhǔn)確的障礙物分布數(shù)據(jù),。